元記事:blender.org - Inverse Kinematics
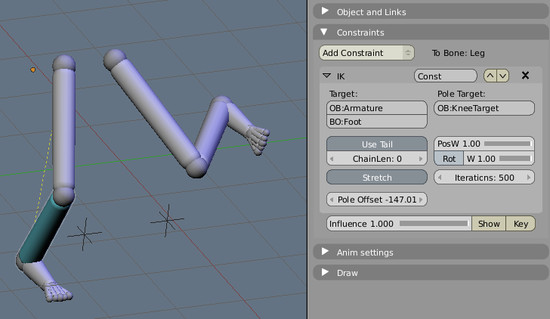
IK Solver Constraint が、Pole Target(極座標ターゲット)がサポートされ、IK チェーンの Roll をコントロールできるようになりました。一般的な例として、脚にこれを使用し、IK ターゲットを足に、そしてIK Pole ターゲットをひざの方向のコントロールに使用するなどです。Roll のオフセットは、"Pole Offset" ボタンで設定できます。
[wiki]-この機能が上手く動作するためには、IK チェーンは Rest Position で初期方向を持っている必要があり、さらに単なる真っ直ぐのチェーンではいけません。このことは Pole Target が使用されているかどうかにかかわらず、IK Solver を正しい方法に誘導し、より予測可能な結果を得られるようになる、いい習慣だということを覚えておいて下さい。
-Pole Target は、複数の IK Constraint を一度に処理する Tree IK では動作しません。この場合、IK チェーンの Roll はすでに複数のターゲットにより決定されているためです。この自由度(Degree of Freedom, DoF)が存在するのは単一の IK Target のみです。
-最初の Bone の DoF と Limit は無視されます。Pole Target のチェーンの狙いは、IK Solver と完全に分離して動作し、チェーン全体がまとめて回転します。したがって、これらの設定は使用されないのです。
[/wiki]
サンプル .blend ファイル
元記事:blender.org - Inverse Kinematics
インバースキネマティクス(IK)
Pole Target
IK Solver Constraint が、Pole Target(極座標ターゲット)がサポートされ、IK チェーンの Roll をコントロールできるようになりました。一般的な例として、脚にこれを使用し、IK ターゲットを足に、そしてIK Pole ターゲットをひざの方向のコントロールに使用するなどです。Roll のオフセットは、"Pole Offset" ボタンで設定できます。
使用方法
[wiki]-この機能が上手く動作するためには、IK チェーンは Rest Position で初期方向を持っている必要があり、さらに単なる真っ直ぐのチェーンではいけません。このことは Pole Target が使用されているかどうかにかかわらず、IK Solver を正しい方法に誘導し、より予測可能な結果を得られるようになる、いい習慣だということを覚えておいて下さい。
-Pole Target は、複数の IK Constraint を一度に処理する Tree IK では動作しません。この場合、IK チェーンの Roll はすでに複数のターゲットにより決定されているためです。この自由度(Degree of Freedom, DoF)が存在するのは単一の IK Target のみです。
-最初の Bone の DoF と Limit は無視されます。Pole Target のチェーンの狙いは、IK Solver と完全に分離して動作し、チェーン全体がまとめて回転します。したがって、これらの設定は使用されないのです。
[/wiki]
サンプル .blend ファイル
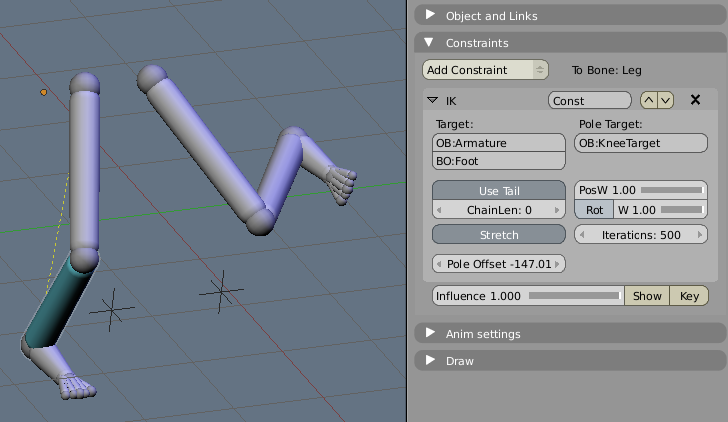
Pole Target でコントロールされているひざの方向
元記事:blender.org - Inverse Kinematics
投票数:61
平均点:10.00
 Blender2.46 NDOF サポート |
 Blender機能別 |
 Blender2.46 Pose ライブラリ |
ログイン
クイックリンク
2021/07/01版
●Blender.org
BlenderFoundation
- Blenderのダウンロード
- 公式チュート等
- 公式マニュアル(和訳)
●ニュース(英文)
BlenderNation
●Blenderコミュニティ
blenderartists.org
●Blender Q&A
- Blender Stack Exchange
●テストビルド
Buildbot(自動生成)
●開発関連
公式開発サイト
Blender開発blog
Blender Wiki
●Blender.org
BlenderFoundation
- Blenderのダウンロード
- 公式チュート等
- 公式マニュアル(和訳)
●ニュース(英文)
BlenderNation
●Blenderコミュニティ
blenderartists.org
●Blender Q&A
- Blender Stack Exchange
●テストビルド
Buildbot(自動生成)
●開発関連
公式開発サイト
Blender開発blog
Blender Wiki